Hiya,
As I suggested this forum, I thought I should put in what I’m doing. As I noted in my profile, I have experience with a number of printers and I thought I’d try my hand at creating my own. In doing this, I set out some guidelines for myself:
- As simple a Cartesian printer as possible. I don’t love this approach, but it’s simpler than a Core XY for a first attempt.
- To use as much of the stockpile of parts that I have collected over the years as possible.
- I know my wife will appreciate me minimizing costs and clearing out a few boxes of stuff in the basement.
- The frame will use 20mm, 40mm & 60mm x 20mm V-Slot rails using the sizes I have in stock.
- I wanted the frame to be easily modifiable as I worked my way through the project and discover things that don’t quite fit right and need a bit of tweaking.
- I don’t want to cut any pieces unless I have to.
- Have a 220mm x 220mm build surface with 200mm to 250mm vertical height.
- Use the Robin V3 controller with a 3.5" touch display.
- Use TMC2209 drivers for the Steppers and take advantage of the built in StallGuard instead of having to add end stop micro switches.
- Use a Micro-Swiss Ender V3/V10 direct drive hot end.
- When other hardware is required, look to use standard OpenBuilds parts.
- When specialty parts are required, design and fabricate them using one of my existing 3D printers and reuse the designs as much as possible. With the various aluminum and steel 3D printer parts I have, they tend to be very printer specific and not very amenable to a printer designed using V-Slot rails as the frame.
- Design as few specialty parts as possible and reuse as much as possible.
With these guidelines, I have created this frame for the printer:

I have most of the custom parts designed - for attaching the heated bed support plate to the V-Slot runner, I came up with the following “Platform Support” design, along with a stepper holder:

With a corresponding tensioner:

The Platform Support is two different colours because I ran out of filament as I was printing the final version and I didn’t have the same colour on hand.
When I first started the project, I was hoping that I would only need one vertical rail for the X-Axis and Hot End gantry, but I didn’t find that a 3D printed part would be rigid enough - so I’m going to have two Z-Axis Steppers on either side of the frame.
I am almost finished with the left and right X-Axis gantry pieces, but they need a bit of tweaking to make sure they’re actually perfectly dimensioned. This should be done in the next couple of days (the prints take 12+ hours each once I’m happy with the designs).
Once the X-Axis gantry pieces are completed and installed, I’m going to have to print a BLT holder for the Micro-Swiss hot end and then wire everything up.
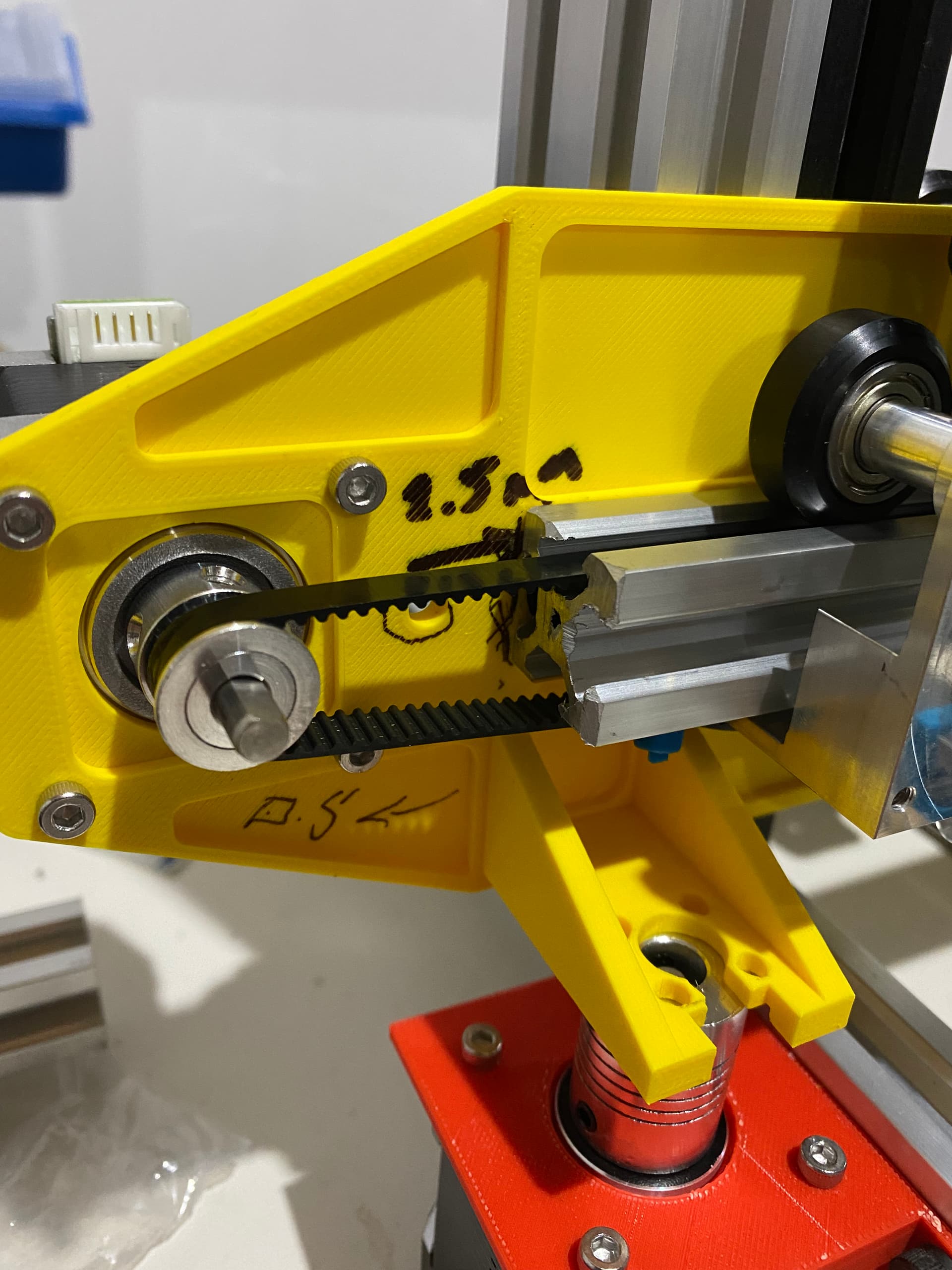
I’m not 100% sure how the drive belt should be positioned for the X-Axis (running through and along the V-Slot) - does anybody have any suggestions/things to watch out for?
I’m obviously going to have to create custom Marlin firmware for the project - I’ve been looking around for good tutorials - can anybody point me to one? This will be my first time, but I’m very familiar with software development.
That’s it for now - I’ll keep you updated as to my progress.
Any comments, suggestions or warnings would be greatly appreciated.
myke